
GVM/GVMW-2260
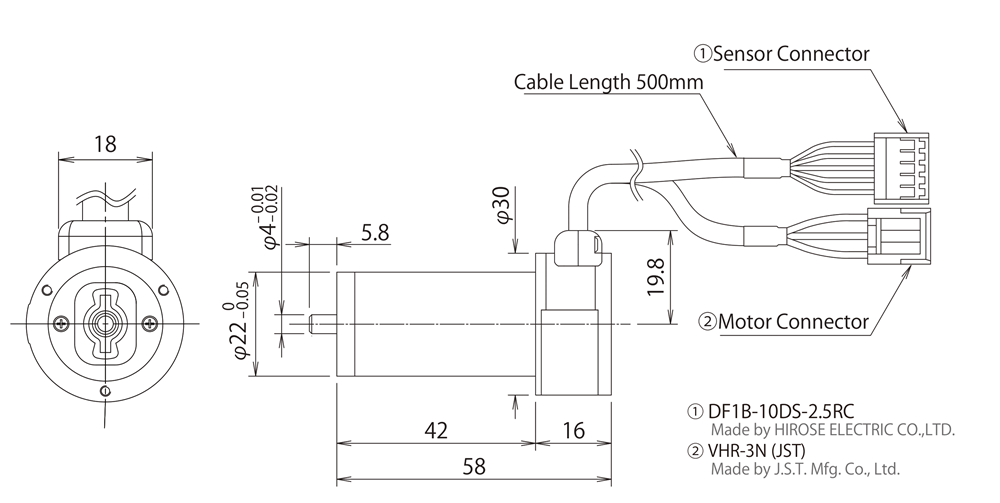


GVM/GVMW-2260
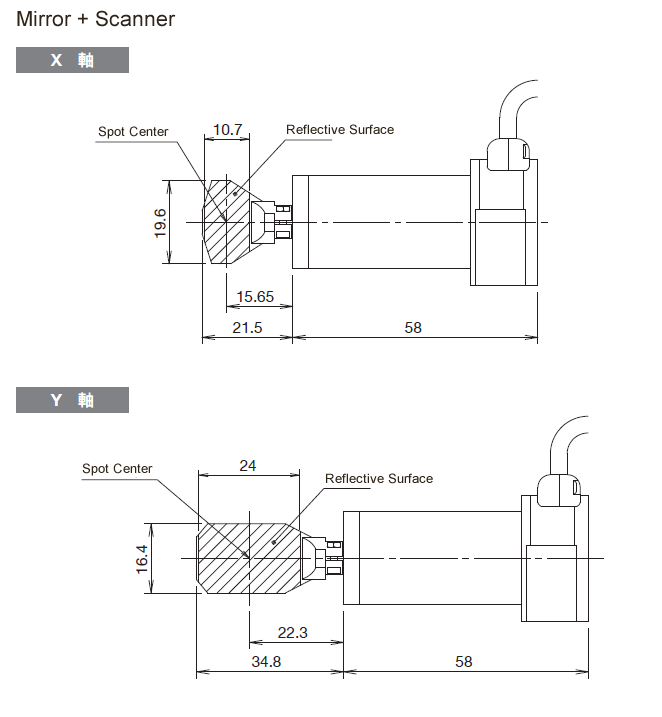
(※)Scanner drawing with GM2 mirror assembly.
- 马达特性
- 工作性能
马达特性
| 项目 | 单位 | GVM-2260 | GVMW-2260 |
|---|---|---|---|
| 最大扫描角度(机械角) | deg mech. | ±20 | ±40 |
| 转动惯量 | g・cm2 | 0.52 | |
| 线圈电阻 | Ω | 1.1±10% | |
| 线圈阻抗 | mH | 0.1±10% | |
| 转矩 | mN・m/A | 8±10% | |
| 逆起电压 | mV/deg/sec | 0.14±10% | |
| 峰值电流 | A (Max.) | 21.8 | |
| 最高线圈温度 | °C | 110 | |
| 重量 | g | 155 | |
- 马达特性
- 工作性能
工作性能
| 项目 | 单位 | GVM-2260 | GVMW-2260 | |
|---|---|---|---|---|
| 重复精度 | µrad | 8 | ||
| 非线性度(±10°) | % | 0.1 (Max.) | 0.1 (Max.) | |
| 非线性度(±20°) | % | - | 0.3 (Typ.) | |
| 非线性度(±30°) | % | - | 0.8 (Typ.) | |
| 非线性度(±40°) | % | - | 3.0 (Typ.) | |
| 零点漂移 | µrad/°C | 10 (Max.) | ||
| 比例漂移 | ppm/ °C | 30 (Typ.) | ||
| 输出信号 | 同相信号 | µA | 350(Typ.) | 468(Typ.) |
| 差分信号 | µA/deg | 11(Typ.) | 10(Typ.) | |
| 输入信号 | mA | 30(Typ.) | 30(Typ.) | |
- (※)All those specifications are assured by using Citizen Chiba servo driver and mirror.
- (※)All angles are in mechanical degrees.
