エンコーダの種類、特徴
A,B,Z相について
|
エンコーダは機械的な変位(アナログ値)を電気信号(デジタル値)に変換します。変換された位置情報はパルス信号として出力されます。 パルス信号はA相、B相、Z相の3つあり、それぞれに役割があります。 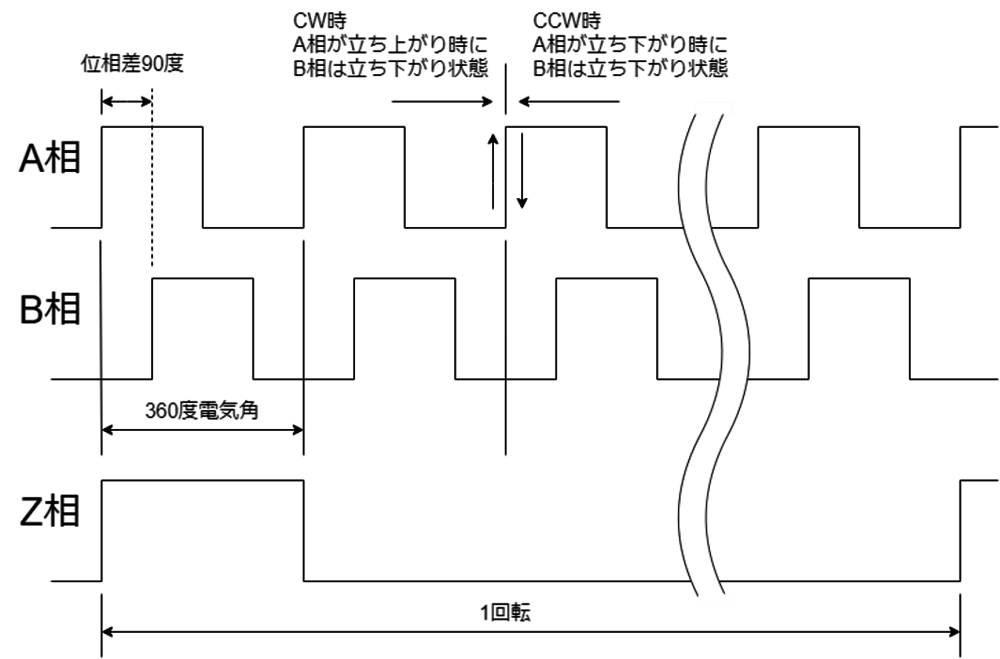
|
インクリメンタル式とアブソリュート式
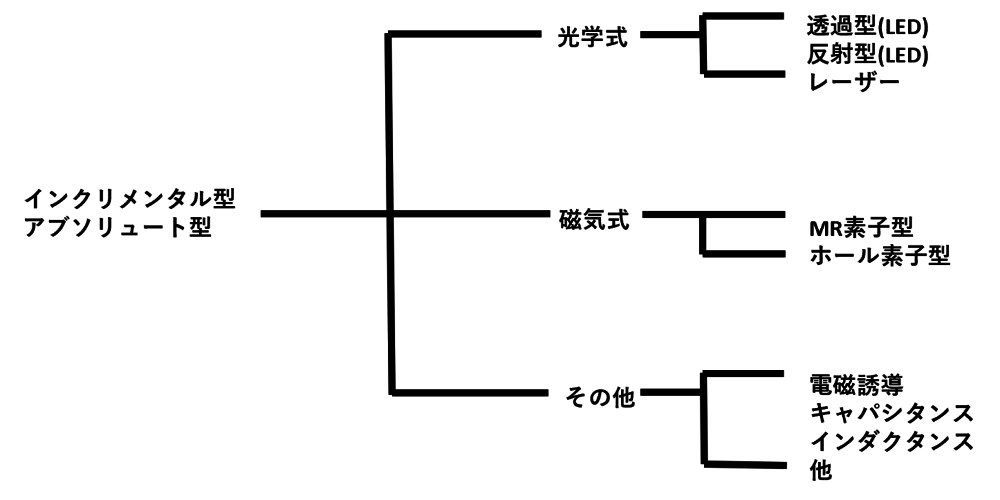
モータのエンコーダには、インクリメンタル式とアブソリュート式の2種類があります。インクリメンタル式とアブソリュート式の違いは、相対位置(角度)を知ることができるか、絶対位置(角度)を知ることができるかです。
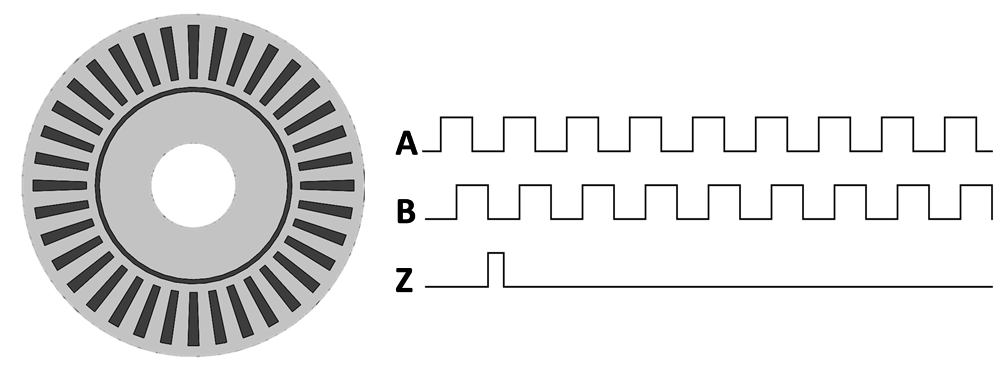
・インクリメンタル式エンコーダ
インクリメンタル式エンコーダは、A相・B相・Z相の3種類の信号を生成します。回転軸の回転に応じて発生するA相・B相の信号(パルス信号)をカウントすることで回転軸の回転量を検知します。A相とB相は90度の位相差がある為、信号の順序から回転方向を判定できます。
Z相の信号(インデックス信号)は1回転に1パルス生成され、回転軸が何回転したのか正確に計測できます。Z相からの相対角度で位置を検出しているため、位置情報を検出するにはエンコーダへの通電後に必ず1度はZ相を通過する必要があります。この3つの信号により、回転軸の初期位置からの、相対位置を表現します。
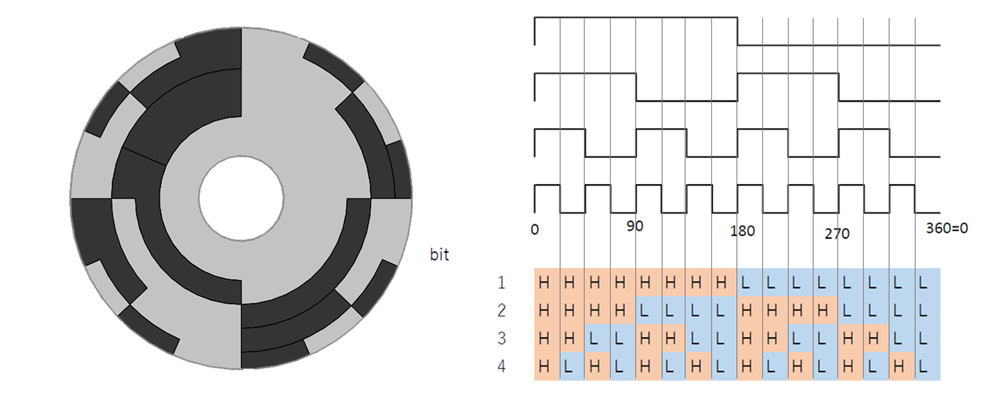
・アブソリュート式エンコーダ
アブソリュート式エンコーダは、回転動作の有無に関わらず、回転軸が今どこにいるのかを検出します。こちらは、回転軸の初期位置の情報が無くても回転軸の正確な位置(絶対位置)を把握、表現できます。
・それぞれのメリット、デメリット
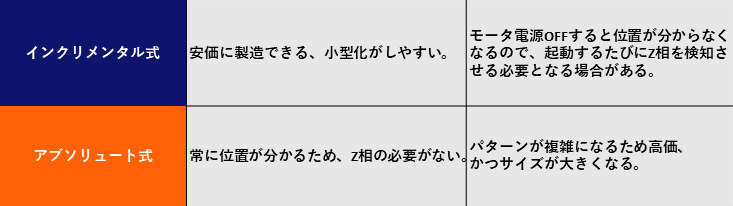
※弊社の標準品はインクリメンタル方式を採用しております。
