ガルバノスキャナ:スキャナ
ガルバノスキャナ:スキャナ
|
ガルバノスキャナはミラーを動かす駆動源で、特殊な構造のモータと位置センサで構成されています。機種選定で重要な要素はミラーサイズと振れ角です。スキャナサイズはミラーサイズにより決まり、振れ角は光学系の設計に応じて決めます。弊社では、位置センサに光学式アナログセンサを採用しています。 ガルバノスキャナ用モータの特徴は、限定した角度を揺動させるのに特化したモータを採用していることです。回転角度を限定することで、DCモータで必要な整流子とブラシや、ブラシレスモータで必要な転流のための磁極センサを必要としないメリットがあります。またモータの摩擦要因が少なく、かつコアレスモータ構造により高応答で高精度な角度制御が可能です。 ガルバノスキャナは高速に目標角度へ移動することが求められます。そのため、回転運動系の運動方程式:回転トルク[N・m] = イナーシャ[kg・m2] ✕ 角加速度α[rad/sec2] であきらかなように、高い急加速性を得るために、瞬時的に高いトルクが出せることとローターイナーシャが小さいことが重要となります。 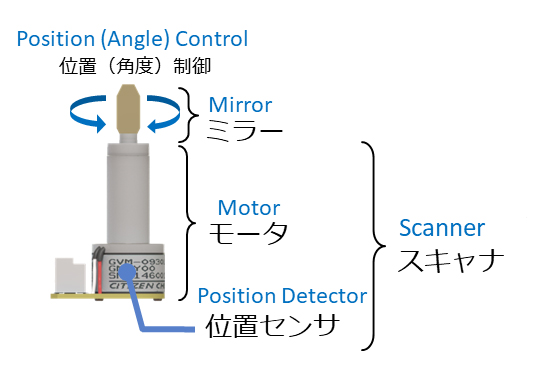
|
スキャナサイズ

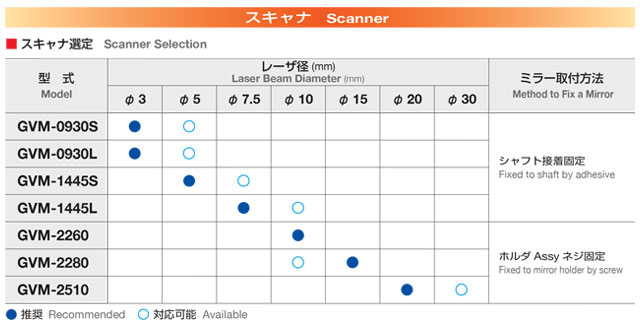
先に述べた通り、スキャナサイズはミラーサイズによって決定されます。ミラーサイズに合わせてそれぞれのスキャナが最適設計されております。GVM-0930やGVM-1445など、型式の4桁の数字はスキャナの外径を示しています。
ミラーサイズとスキャナサイズの最適な組み合わせで使うことが重要になります。
振れ角
弊社のガルバノスキャナは標準で振れ角の最大値で±10°~±20°(機械角)まで駆動できるようになっています。振れ角度が大きくなると、リニアリティ(精度に影響)が悪化する傾向にあります。
仕様に合わせて、最大の振れ角を±10°以下に設定することも可能です。
ケーブル長
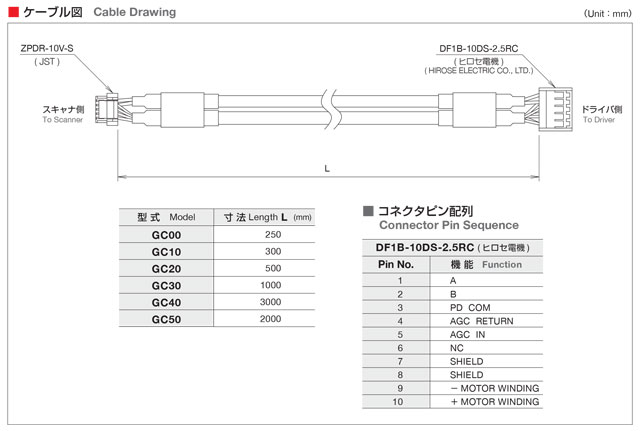
スキャナからドライバ間の接続ケーブルの長さも、スキャナの型式に含まれています。GVM-2260以上の大きなスキャナはケーブルが直結されています。GVM-1445以下の小さなスキャナは、専用の中継ケーブル(GCxx)をコネクタに接続して使用します。
ケーブル長はスキャナの電気抵抗やインダクタンスに影響を及ぼし、スキャナの動作スピードに関わります。短いものは電気抵抗が小さく動作させるうえで有利ですが、性能への影響は支配的ではありません。弊社の標準品で最長のものである3mケーブルであっても、性能への影響はほとんどありません。
ケーブルはスキャナセンサからのアナログ位置信号出力を伝送しているため、ノイズ対策を施したケーブルを使用しています。
出力軸形状

スキャナサイズによって、ミラーホルダ形状が異なります。
GVM-2260以上のサイズのスキャナは、出力軸にミラーの付いたホルダをネジで締結します。ネジを緩めるだけで、ミラーを取り外すことができます。
GVM-1445以下のサイズのスキャナは、ミラーホルダを出力軸に直接接着しています。そのため、ミラーの交換は不可能となりますが、イナーシャを小さく抑えることができ、動作させるうえで有利です。わずかなイナーシャの差が大きく影響するため、小さなスキャナがこの形状を標準としています。
お客様ご支給のミラーを接着することも可能です。その際はご相談ください
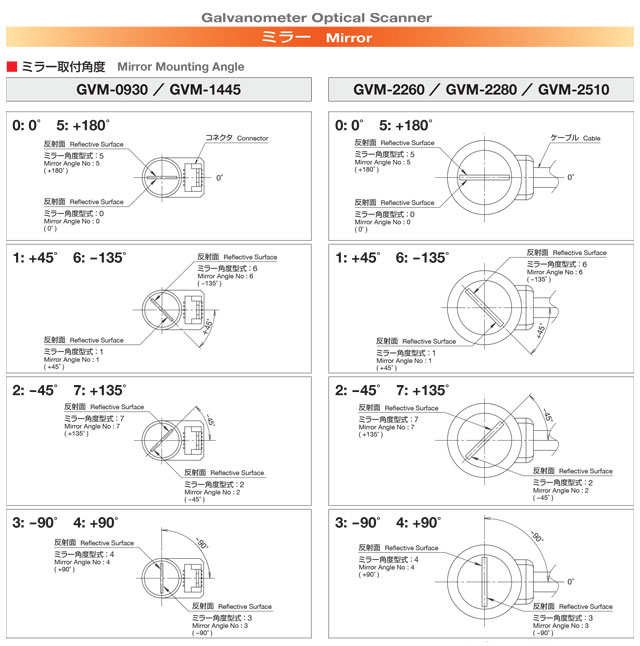
ケーブル出口に対するミラー角度 および ミラー有無
ガルバノスキャナ周辺の構造やガルバノスキャナの姿勢に基づき、ケーブル出口とミラー位置が選択できます。
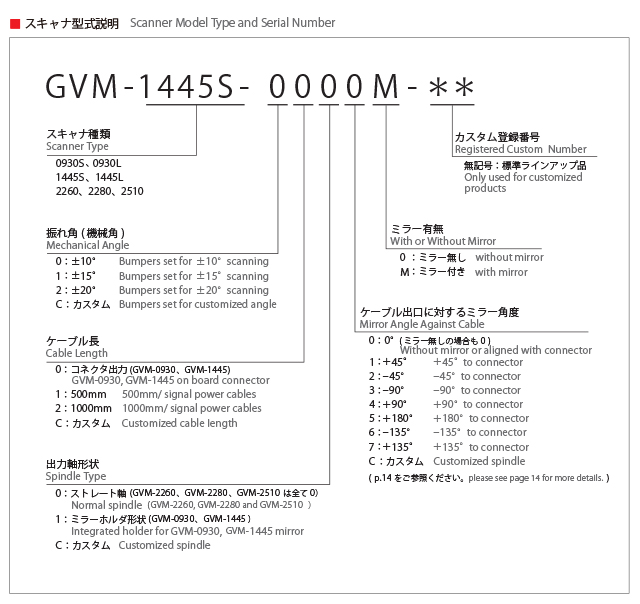
型式
1. スキャナ種類、2. 振り角、3. ケーブル長、4. 出力軸形状、5. ケーブル出口に対するミラー角度、6. ミラー有無の6項目が決まれば、スキャナの型式が決まります。
位置センサ
弊社の位置センサは光学式アナログセンサを採用しています(特許取得)。エンコーダを搭載したデジタルガルバノスキャナは、現在のところ取扱っておりません。
アナログの位置センサ(光学)は軸端に取り付けられた反射板に光を当て、その反射光を受光素子が電圧に変換することで角度位置を検出しています。可動部には反射板だけで取り付けられるため軽く、高速動作に適しています。光源のLEDや受光素子のフォトダイオードに個体差があるため、スキャナ個体毎に調整しており、スキャナとドライバは1対1の組合せとして出荷します。また、LEDやフォトダイオードの温度特性等によるドリフトを低減するための補正回路をドライバに組み込んでいます。
デジタル位置センサは軸端にロータリーエンコーダを取り付け、角度情報をデジタル信号として出力します。高分解能エンコーダを使うことで高い位置決め精度が期待できます。エンコーダが温度の変化やノイズの影響を受けづらいことも位置精度に有利な理由です。ただしエンコーダは反射板よりもイナーシャが大きいことや、演算や信号の変換による処理時間が必要なことから、高速動作には不利となります。また、アナログの位置センサに対して高価にもなります。
アナログ、デジタルそれぞれに有利な点、不利な点があり、どちらが優れているということはなく、それぞれを適材適所として使用されています。
