ガルバノスキャナ:ドライバ
ドライバとは
|
ドライバとは制御対象のガルバノスキャナの位置センサ等から各種フィードバック信号を受け、ミラー位置(角度)を制御するためにガルバノスキャナに電力を供給する装置です。ドライバ内部では、上位からの位置指令信号とガルバノスキャナに内蔵される位置センサ信号の比較制御演算を行い、指令信号に追従するために必要な電力を供給しています。 前述の位置指令信号を出力する装置をコントローラと呼びます。コントローラは目的に応じ、ミラーの位置をドライバに指令する装置、ドライバはこのミラー位置指令信号にガルバノスキャナミラー位置を追従させるためにガルバノスキャナを制御する装置です。 |
機種

弊社には汎用機種のGVD0、ハイパワーのGVD1、小型スキャナ(GVM-1445Lまで)用のGVD2があります。性能・サイズ・最適用途が異なります。特にGVD2は制御対象を小型スキャナ用に限定し、小型化されています。
最も大きな違いは瞬間最大電流(ピーク電流)です。スキャナは流れる電流に比例した加速度(トルク)を発生します。ミラーイナーシャの大きさ、加速度の大きさが大きいほど、大きなトルクが必要となり、大きな電流を流す必要があります。
GVD1は瞬間最大電流が11.5Aと、弊社のドライバにおいて最も大きなドライバになります。
GVD2はGVD0と同等の10Aの瞬間最大電流を持ちますが、省スペース、省コストのため、大きなサイズのスキャナ(GVM-2260以上)のケーブルが接続できません。このため小型スキャナ専用機となっています。
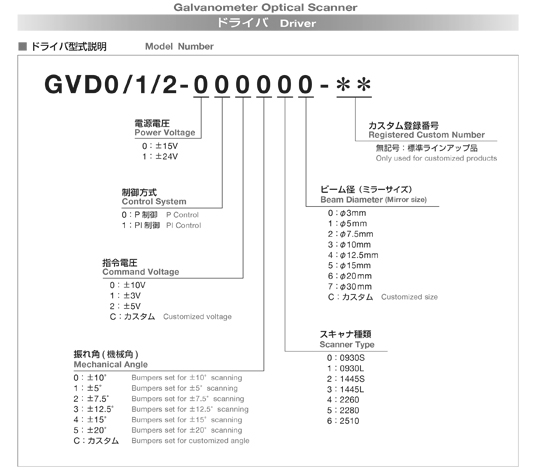
電源電圧
ドライバには直流電源を接続する必要があります。型式に応じて利用可能な電源電圧が異なるため、±15Vか±24Vかをご選択ください。±両電源が必要となることにご注意ください。電源電圧は大きいほど駆動に有利であり、±15Vと±24Vでは±24Vの方がより高い性能を発揮することができます。
GVD1とGVD2の二機種は、異なる電源電圧も使用することができます。GVD1は±18Vから±30Vに対応しており、GVD2は±15から±30Vに対応しています。
使用する直流電源の容量を決定する際には、十分な電流が確保されていることが重要になります。この際に参照すべきドライバの性能は最大動作電流であり、GVD0とGVD2は2.5A、GVD1は5Aを必要とします。電源の選定においてご参考にしてください。
制御方式
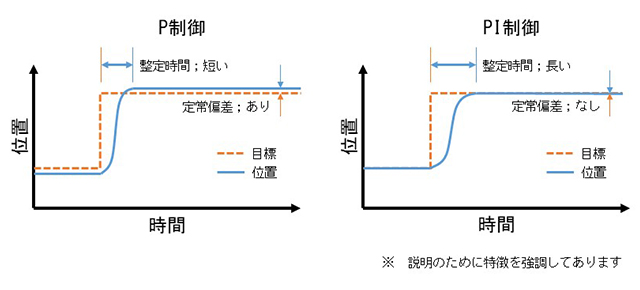
いずれのドライバも制御方式にP制御、またはPI制御があり、どちらかを選択することができます。P制御は応答の速さを重視し、PI制御は位置再現性を重視した制御方式となります。
P制御は指令信号と位置フィードバック信号を比較し、比例(Proportional)演算を行います。高速で動作する反面、定常的な位置のずれを補正する手段を持たず、位置再現性が劣ります。
PI制御はP制御に加えて、時間積分(Integral)演算を行います。定常的な位置ずれを積分して補正するため、高い位置再現性を得られます。しかし、積分時間が必要であり、P制御に比べて速度が劣ります。
標準的に使用されているのはPI制御となりますが、用途に応じてご選択ください。
指令電圧
指令電圧の最大値を変更することができます。標準は±10Vで、正負それぞれ10Vのとき、最大の振り角をとります。コントローラから出力する指令信号の仕様に合わせて決定します。
振れ角
ガルバノスキャナがどれだけ振れるか(機械角)を決定します。指令電圧が最大値のとき、ここで設定した振れ角となります。スキャナの仕様を超える角度設定はしないでください。
スキャナ種類、レーザ径(ミラーサイズ)
ドライバはガルバノスキャナとガルバノミラーのサイズに合わせて、最適に調整されています。そのため異なるスキャナとミラーを組み合わせたときに本来の性能を発揮できません。場合によっては発振し、故障につながるおそれがあるため、ご注文時の組み合わせ以外で接続しないでください。
型式
これらの検討事項から型式を決定することができます。ミラー、スキャナが決定しなければ型式を決めることはできません。また、ガルバノスキャナを使用する環境、装置の電源や、コントローラの仕様に合わせた仕様決定が必要となります。
